You are viewing the Portuguese version of the site, but it has been detected that you are outside of Brazil.
To access the content in English, click here
To access the content in English, click here
Motor DC 3-6V com Caixa de Redução e Eixo Duplo




Payment methods:
- Pay with PayPal
Produtos Relacionados






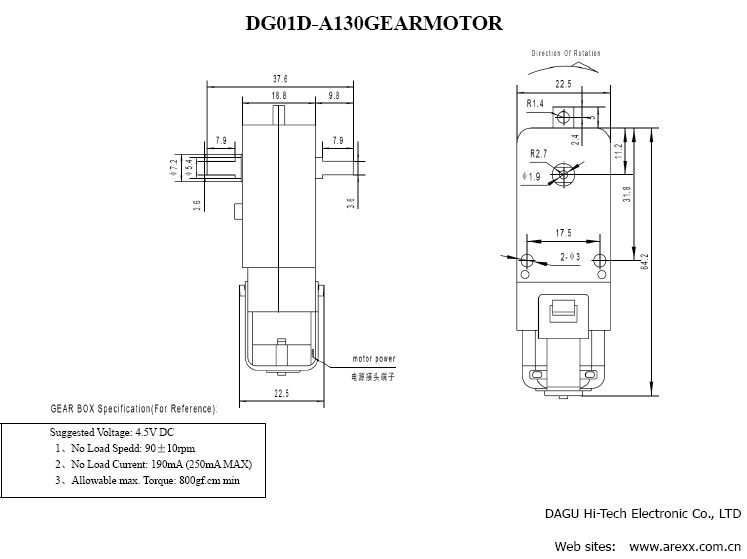
O motor ideal para seu primeiro robô. Ele já vai com uma caixa de redução reta para se encaixar no projeto. Este motor é uma opção barata e fácil de usar para adicionar movimento ao seu projeto. O conjunto possui um eixo de saída de 9mm. Saiba mais sobre o formato do eixo de saída no datasheet. Estes motores são os mesmos utilizados na Plataforma Robótica Rocket Tank, portanto pode servir de peça de reposição para este chassi.
{kind=link}
Este motor requer uma alimentação recomendada de 4,5V. Com eixo aberto, ele precisa de 190mA de corrente para funcionar, enquanto que seu eixo de saída roda a uma velocidade de 140RPM nestas circunstâncias.
Vendido individualmente.
Especificações:
- Tensão de alimentação recomendada: 4,5V
- Corrente em aberto: 190mA
- Corrente com máxima carga: 250mA
- Corrente de Stall: 1.2A @ 6V (0.6A @ 3V)
- Relação da caixa de redução: 48:1
- Velocidade: 140RPM @ 4,5V sem carga
- Torque: 800 gf.cm
Para fazer comentários é necessário estar logado. Efetuar login.
Você ainda nao é cadastrado? Cadastre-se agora!
calarezi11
 Enviado 2026-06-10 09:00:08
Enviado 2026-06-10 09:00:08
gostaria de saber se este motor serve para um robo r2-d2 com corpo de pote de maionese de 500g e quais rodas posso adquirir para este projeto

jorge.silva
Enviado 2026-06-10 11:56:00
calarezi11
calarezi11
Olá! A compatibilidade desse motor com o robô mencionado depende de alguns fatores, como o peso total do projeto após a montagem, o tipo de bateria, a controladora utilizada e a quantidade de rodas. Este motor possui torque de aproximadamente 800 gf.cm, o que pode ser suficiente para projetos leves. No entanto, recomendamos calcular o peso final do robô para garantir um desempenho adequado.
jorge.silva
Enviado 2026-06-10 11:56:07
calarezi11
calarezi11
Caso o projeto fique mais pesado, uma alternativa é o Motor DC 3-6V com Caixa de Redução de Aço ( https://www.robocore.net/motor-caixas-de-reducao/motor-dc-3-6v-com-caixa-de-reducao-de-aco ) que oferece torque superior. Quanto às rodas, uma opção compatível é a Roda Hobby 65mm ( https://www.robocore.net/roda/roda-hobby-65mm ). Também podem ser utilizadas outras rodas com encaixe para eixo no formato "D", desde que compatíveis com as dimensões do eixo do motor.

wellingtongabriel290
Enviado 2022-02-18 16:25:28
Quando chega mais no estoque estou precisando com urgencia

Giovanni5
Enviado 2022-02-18 16:55:20
wellingtongabriel290
wellingtongabriel290
Nós acabamos de adicionar mais unidades deste motor ao estoque, aproveite!
SamuelSerqueira
Enviado 2021-07-20 20:42:03
Boa noite. As rodas NEO servem nestes motores?
Giovanni5
Enviado 2021-07-21 08:14:34
SamuelSerqueira
SamuelSerqueira
Infelizmente não, pois não temos um HUB para roda NEO para o eixo em duplo "D" de 5,4 mm deste motor.
samuraizen
Enviado 2021-03-21 10:44:09
expectativa de estoque ?
Giovanni5
Enviado 2021-03-22 08:37:04
samuraizen
samuraizen
Infelizmente estamos sem previsão de disponibilizar mais unidades deste motor. Recomendamos que você selecione a opção "Notifique-me quando chegar", para receber uma mensagem no seu e-mail assim que o produto estiver disponível para compra.
elton.ivx
Enviado 2020-04-25 19:21:39
Posso usar o regulador de tensão 7805 para alimentar esse motor a partir de uma bateria de 12V? Ou a corrente de stall do motor de 1.2A seria um problema visto que a corrente máxima do regulador é 1A?
Giovanni5
Enviado 2020-04-27 09:37:22
elton.ivx
elton.ivx
Este motor possui uma corrente de stall de 1,2 A em 6 V e de 0,6 A em 3 V, portanto, proporcionalmente, sua corrente de stall em 5 V será de 1 A. Talvez o regulador 7805 seja o suficiente para alimentar estes motores, mas vale lembrar que a corrente máxima de 1 A deste regulador, só é fornecida em condições perfeitas, portanto muito dificilmente ele alcançará este valor. A melhor opção para esta alimentação de motores é utilizar outros métodos para diminuir a tensão, como conversores DC-DC step-down, por exemplo.
henrique.smsilva29
Enviado 2020-01-06 18:11:43
Boa tarde! Qual motor você me indicaria para robô sumô de até 1,5Kg ? Lembrando que não pode ser um motor muito pesado, pois tem outras partes a ser considerado
Giovanni5
Enviado 2020-01-07 08:42:22
henrique.smsilva29
henrique.smsilva29
A escolha do motor para um robô sumô irá depender muito de uma série de fatores, dentre eles, a roda que você pretende utilizar, sua alimentação, a velocidade final desejada, entre outros. Além disso, deve se levar em conta que o conjunto de motores selecionados para o robô deve ser capaz de mover a estrutura do próprio robô, e, para a categoria sumô, superar a força exercida pelo robô adversário para vencer o round. Você deve ser capaz de mover uma estrutura de 1,5 kg com um conjunto de 4 motores desta página, porém eles podem não ser suficientemente eficientes para superar o robô adversário.
steniocaldeira10
Enviado 2019-11-06 17:09:41
Esse motor seria capaz de movimentar um robo de 900g? Usando dois motores desse para diferentes rodas
Giovanni5
Enviado 2019-11-07 08:28:24
steniocaldeira10
steniocaldeira10
Um par desses motores é capaz de movimentar um robô de até 1 kg, porém os motores não estarão atuando em seu melhor rendimento. O mais indicado seria utilizar 4 motores deste, um para cada roda.
Giovanni5
Enviado 2019-11-07 13:06:07
steniocaldeira10
steniocaldeira10
Vale lembrar que, para a movimentação do robô com dois motores, irá depender muito da roda utilizada, e se será utilizada alguma redução mecânica para esse acoplamento, como correias ou engrenagens. Recomendamos 4 motores para esse peso, pois devem ser capazes de movimentar esse peso normalmente sem a necessidade de reduções extras.

allanveiga.g
Enviado 2019-06-08 20:49:57
Tem previsão para chegada de mais unidades no estoque?
Giovanni5
Enviado 2019-06-10 12:24:57
allanveiga.g
allanveiga.g
A previsão de chegada deste produto é para o final do mês de Julho. Você pode selecionar a opção "Notifique-me quando chegar" para receber em seu e-mail uma mensagem quando o produto estiver disponível para compra.
allanveiga.g
Enviado 2019-05-08 11:43:27
O motor tem força para apertar uma chave gangorra para ligar e desligar a luz de meu quarto ?
Giovanni5
Enviado 2019-05-08 13:12:52
allanveiga.g
allanveiga.g
Este motor deve ter força o suficiente para apertar uma chave gangorra. Entretanto, ele talvez não seja a melhor opção para ligar e desligar uma chave gangorra. Para acionar e desligar cargas de corrente alternada recomendamos utilizar o módulo relé (https://www.robocore.net/loja/itens-eletronicos/modulo-rele).
pedroborgesptu
Enviado 2018-10-23 20:34:49
Tem previsão para reposição de estoque?

ViniDj
Enviado 2018-10-24 10:17:52
pedroborgesptu
pedroborgesptu
Infelizmente não temos uma previsão precisa neste momento. Estamos verificando a possibilidade de ter mais unidades ainda este ano, porém ainda não é certo. De toda forma temos em estoque nesse momento a opção desse motor com a caixa de redução em ângulo, dê uma olhada em: https://www.robocore.net/loja/produtos/motor-dc-com-caixa-de-reducao-6v-48-1-angulo.html
ROBOCORE TECNOLOGIA
A RoboCore foi criada em 2008 com o intuito de incentivar o desenvolvimento tecnologico, fabricando e fornecendo peças para automação e robótica de alta qualidade a preços acessíveis.
RoboCore Tecnologia LTDA
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil
NOSSAS REDES SOCIAIS
LINKS ÚTEIS
POLÍTICAS DA LOJA
CENTRAL DE ATENDIMENTO
Formas de Pagamento
AUDITORIA DE SEGURANÇA

Site 100% Seguro
Auditado Diariamente
Auditado Diariamente