To access the content in English, click here
Julieta V1.0




Produto Descontinuado
Esta página deve ser usada apenas como referência
Produtos Relacionados








Atenção: Esta placa foi descontinuada devido a falta de componentes que está afetando as indústrias de todo o mundo. Sugerimos substituí-la em seus projetos pela mais nova placa controladora de motores da RoboCore, a VESPA.
A Vespa conta com o módulo ESP32 com WiFi e Bluetooth, ponte-H dupla e conversor DC-DC para servos motores.
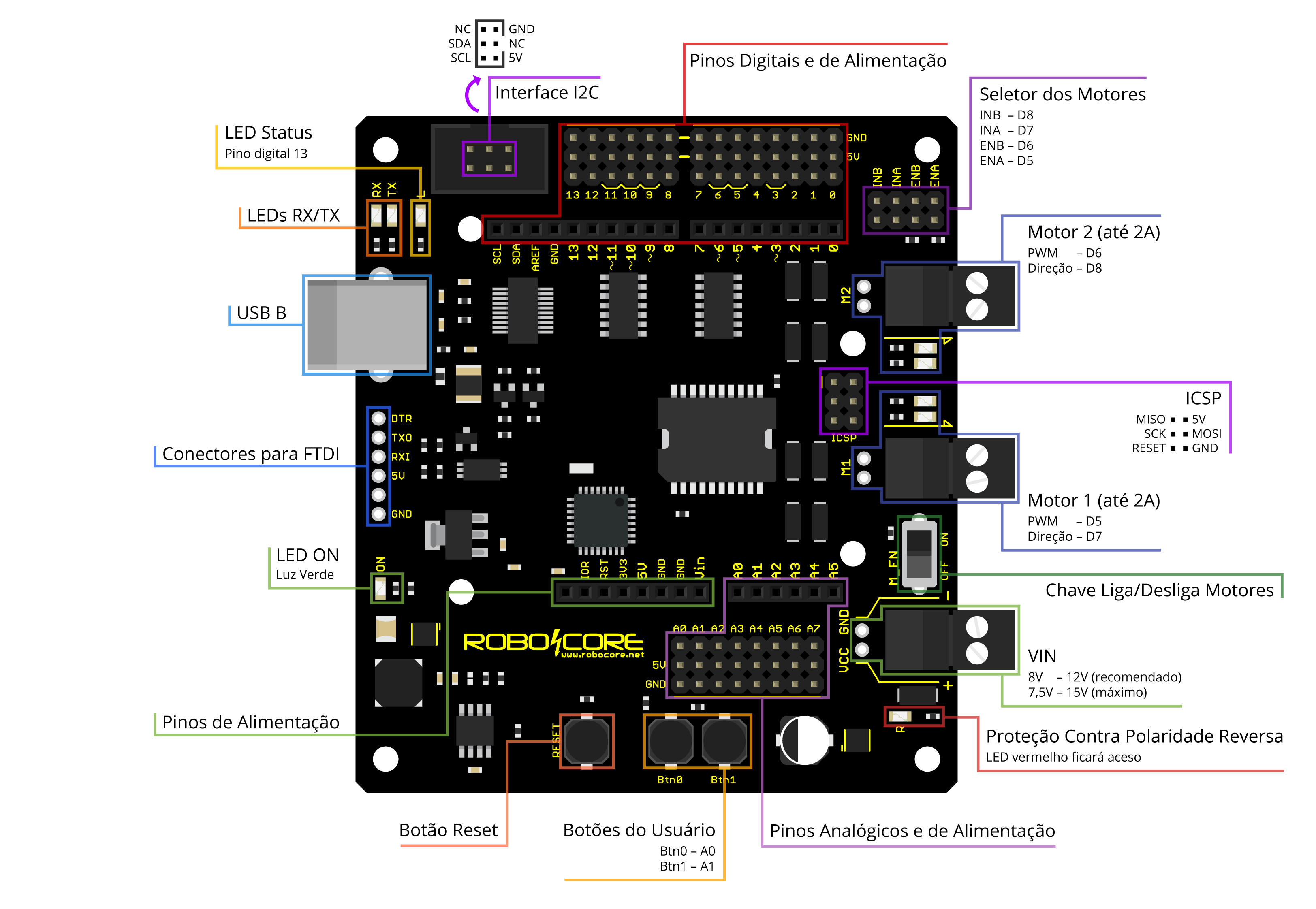
A Julieta é a solução completa para criação de robôs móveis de pequeno porte que possui todos os componentes necessários para movimentar seu robô em uma única e compacta placa, de apenas 8x9cm.
A Julieta possui um microcontrolador ATmega328P com bootloader do Arduino UNO R3, permitindo que seja programada com a IDE do Arduino, além de ter um chip L298P que permitirá você controlar facilmente 2 motores DC com escova de maneira independente, podendo suprir uma corrente de até 2A, fazendo seu robô ir se movimentar na direção e velocidade que você quiser.
Além disso, possui barramento de pinos macho e fêmea para fácil ligação de sensores ou atuadores,e ainda inclui dois botões para uso geral, que podem ser programados via software, por exemplo, para acionar ou desacionar seu robô.
Com esta simples e compacta solução, seu robô com certeza vai sair não só do papel, mas também do lugar!
Veja abaixo um código de exemplo que faz com que seu robô com a placa Julieta ande pra frente durante 1 segundo, fique parado durante 1 segundo, ande para trás durante 1 segundo e pare novamente:
Especificações:
Microcontrolador:
| Tamanho: | 9 cm x 8 cm x 1,3 cm (9 cm x 9,6 cm x 1,3 cm com os conectores) |
| Microcontrolador: | ATmega328P |
| Tensão de operação: | 5 V |
| Tensão de entrada (recomendada): | 8-12 V |
| Tensão de entrada (limites): | 7,5-15 V |
| Pinos de entrada/saída (I/O) digitais: | 14 (dos quais 6 podem ser saídas PWM) |
| Pinos de entrada analógicas: | 6 (+2 no barramento externo) |
| Corrente DC por pino I/O: | 40 mA |
| Corrente DC para o barramento de 5 V: | 3 A |
| Corrente DC para o pino de 3,3 V: | 200 mA* |
| Memória Flash: | 32 KB (dos quais 0,5 kB são usados pelo bootloader) |
| SRAM: | 2 KB |
| EEPROM: | 1 KB |
| Frequência de clock: | 16 MHz |
| Temperatura de operação: | de 10 ºC a 60 ºC |
| Garantia de 6 meses para defeitos de fabricação |
Circuito Controlador de Motores:
| Circuito Integrado: | L298P |
| Corrente máxima por motor: | 2A |
| Tensão drenada aos motores: | 7,5V a 15V (a mesma tensão dos motores é utilizada para alimentar o microcontrolador) |
Observações:
- Compatível com todos os shields feitos para Arduino UNO R3 (e versões anteriores) existentes
- Programe ela usando a IDE do Arduino, selecionando a placa Arduino UNO R3 (o chip ATmega328 usado possui o bootloader do Arduino UNO R3)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Para fazer comentários é necessário estar logado. Efetuar login.
Você ainda nao é cadastrado? Cadastre-se agora!
Bom dia. Tem previsão de quando chega a placa para venda?
SamuelSerqueira
Desculpa. Agora q vi na descrição, a resposta para minha pergunta. Obrigado.
Existe a possibilidade de eu controlar os motores através de um joystick analógico ? Situação: Possuo 2 motores RC que vão movimentar o robo e mais 2 servos que vão movimentar a câmera. quero controlar os 2 RC com um joystick e os 2 servos com o outro joystick. O arruíno que estou utilizando é o julieta v1. Já consegui controlar os dois servos pesquisando na internet, mas os motores RC ficam em um estado de curto quando ligados (sou iniciante). Alguém poderia ajudar ?

victorbragaeng
Sim, é possível controlar os motores DC conectados à Julieta usando um Joystick, e para isso você precisará mapear as leituras dos eixos do Joystick, basicamente como você deve ter feito para o controle dos servomotores. Se quiser, você também pode inserir uma lógica no seu código, para verificar se o eixo do Joystick foi posicionado para a frente, e controlar ambos os motores ao mesmo tempo, e controlar apenas um dos motores quando o eixo do Joystick for colocado para um dos lados, simulando um rádio controle.
victorbragaeng
Giovanni, primeiramente obrigado, consegui fazer o controle dos motores! Agora possuo outra duvida: Gostaria de alimentar uma fita led com o arduino, acionando e desligando-a através do botão digital do joystick. O problema é que essa fita led é 12V e a única maneira de alimentar ela sem ser direto na fonte externa é na saída Vin, gostaria de saber se eu consigo manipular o envio de tensão nessa porta e qual o nome de acesso dela para acessar na IDE.
victorbragaeng
O pino Vin é apenas uma saída de alimentação, então não pode ser controlado. Você pode controlar o acender e apagar da sua fita de LED usando um relé (https://www.robocore.net/atuador-rele/modulo-rele), basicamente como é mostrado no esquema elétrico do tutorial a seguir, https://www.robocore.net/tutoriais/acionando-uma-lampada-pela-rede-ethernet .

pensei q havia resolvido meu problema mais n, os motores estao tao fracos que chegam a parar, e ele so funciona com 1 dos motores, ao ligar o segundo, ela para
umabatatam
testei a placa ligada numa fonte 9v e funcionou bem, porem na bateria não vai, nem usei as baterias e elas tao fracas
umabatatam
descobri q com 4 baterias de 9v em serie funciona....
umabatatam
paralelo*
umabatatam
Baterias de 9V não são recomendadas para alimentação de motores, pois elas possuem uma taxa de descarga de corrente muito baixa. Quando você conectou as 4 baterias em paralelo você quadruplicou a corrente que estava sendo fornecida para os motores (em paralelo a tensão de saída é a mesma, mas as correntes são somadas), basicamente compensando a limitação de uma única bateria.
minha placa simplesmente n funciona , os motores nao giram e os leds de direçao ficam piscando, isso com o codigo de demonstraçao da julieta
umabatatam
resolvi o problema
Sairás uma versão 2.0? Caso tenham uma atualização uma ideia seria colocar a barra de pinos para ligar os modulos bluetooth diretamente na placa.
fagner.cn
Infelizmente não temos uma previsão ou planos para desenvolver uma versão 2.0 da Julieta no momento, mas agradecemos pela sugestão da conexão direta com módulos Bluetooth, iremos considerar essa possibilidade para uma eventual atualização da placa.
Qual a vantagem de adquirir esta placa ? inves de uma blackboard em conjunto com o shield motor drive 2x2A A placa tem 5 6 7 8 interligados com o controle de motores ?
fagner.cn
A Julieta V1.0 é basicamente uma BlackBoard UNO acoplada à um Shield Motor Driver 2x2A, porém com todo o circuito embarcado em uma única placa (inclusive os pinos de controle dos motores são os mesmos do Shield 2x2A (5, 6, 7 e 8)). Além disso, a Julieta também possui 2 portas analógicas a mais (A6 e A&), por conta da versão SMD do microcontrolador ATmega328, e ela ainda possui uma corrente de saída de 5V maior, para poder controlar diversos servomotores
Olá, tentei utilizar o Aplicativo Arduino Droid para programar a placa, utilizando o tipo de placa com "Arduino Uno", mas dá erro na hora de fazer upload do código, dizendo que o tipo de placa está incorreto... Poderiam me ajudar?
vini.rma200
A Julieta utiliza o mesmo bootloader de placas da plataforma Arduino Uno para receber os códigos, inclusive o modelo selecionado na Arduino IDE é "Arduino Uno", portanto o ArduinoDroid não deveria retornar esse tipo de erro. É possível que a sua placa não esteja sendo reconhecida pelo seu celular,, e por isso o aplicativo está retornando esse erro. Levando isso em conta, verifique se o seu celular possui a funcionalidade "USB Host". Além disso, talvez seja necessária a instalação do driver FTDI no seu celular (https://ftdichip.com/software-examples/android-java-d2xx/).

Olá temos o componente dessa placa para o Fritzing? Estou apanhando aqui com algumas configurações nela e ajudaria muito. Obrigado
brunodini
Adicionamos na "Descrição" do produto um link de download do componente da Julieta para Fritizing.
brunodini
Uou, muito obrigado! Vocês são feras!
Ok, obrigado, ajudou muito. Agora me diga como fica o processo de enviar ordens por smartphone por bluetooth sem usar a famosa biblioteca (ou usando ela), criada especificamente para a Julieta ? Em códigos que vi se inicializava IN1, IN2, IN3 e IN4 e cada uma delas recebia os comandos do smartphone (Forward, Backward, Left e Right). Mas com o inversor dentro da Julieta eu vou ter dois acionadores ou não de cada um dos motores (ENA e ENB), mais um para INA1 e outro para IN3. Como eu compatibilizo a parte do código para o smartphone entender o que desejo para o carrinho ?
fernando_fgc
Você pode utilizar a biblioteca "FalconRobot" do Kit Iniciante para Robótica para o desenvolvimento desse projeto, inclusive isso deve facilitar o controle dos motores. Você também pode, se preferir, não utilizar a biblioteca, e realizar os acionamentos dos pinos diretamente. Neste caso você precisa enviar um sinal alto ou baixo ("HIGH" ou "LOW") para os pinos 7 e 8, e um sinal de PWM para os pinos 5 e 6, assim os motores já serão acionados. Note que a lógica de acionamento é muito semelhante aos outros drivers que se utilizam de 6 pinos digitais, porém utilizando dois pinos a menos.
fernando_fgc
Talvez o melhor para o seu projeto seja você testar as funcionalidades separadamente e então mesclá-las, ou seja, verificar o acionamento dos motores e a leitura do módulo Bluetooth separadamente. Assim facilita o desenvolvimento final do código, mas lembre-se que será necessário testar o seu funcionamento e corrigir possíveis comportamentos indesejados.
Bom dia, fiquei curioso, como a Julieta controla os comandos para INA1, INA2, INA3 e INA4 com apenas os pinos D5 e D6 ou é D5, D6,D7 e D8 no controle de INA1, INA2, INA3 e INA4 e o estranho é o D5 e o D6 controlarem também o ENA e o ENB ?
fernando_fgc
As portas ENA e ENB do chip L298 são controladas pelos pinos 5 e 6 da Julieta, e as portas INA1, INA2, INB1 e INB2 são controladas pelos pinos 7 e 8. Esses dois pinos da Julieta são conectados à um inversor lógico, que como o próprio nome já diz, inverte o nível lógico do pino, para uma das portas do driver, ou seja, se o pino 7 estiver em nível lógico alto (HIGH), as portas INA1 e INA2 vão receber sinais invertidos (alto (HIGH) para INA1 e baixo (LOW) para INA2), por exemplo.
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil

Auditado Diariamente