Kit Iniciante Robótica - 3. Montagem Eletrônica
O coração do robô é a placa Julieta. Ela faz a corrente elétrica fluir das pilhas aos motores, a partir da programação que iremos desenvolver. Ela recebe os sensores, possui botões e é extremamente versátil para projetos robóticos, não só para robôs móveis como braços robóticos, hexapods, etc. Vamos conhecer um pouquinho melhor essa excelente plataforma.
A placa Julieta foi desenvolvida para ser a opção mais versátil possível para aplicações em robótica. Ela conta com um barramento de entradas/saídas no padrão de 3 pinos para que você possa facilmente conectar sensores, módulos, servo motores, etc. Além disso, um chip de Ponte-H integrado, permite que você controle motores de forma independentes enviando até 2A de corrente para cada um.
O sensor de refetância QRE é o sensor que trás para o seu robô a capacidade de detectar linhas. O sensor trabalha detectando a luz refletida que sai de seu próprio LED infravermelho. Medindo a quantidade de luz infravermelha refletida, ele pode detectar transições entre uma linha escura e uma superfície clara.
O sensor possui 3 pinos que devem ser conectados à placa Julieta através dos cabos jumper fêmea-fêmea. O sinal de saída do sensor é do tipo analógico, portanto deve ser conectado a um pino analógico. A biblioteca FalconRobot tornará o uso desse sensor simples e prático.

O sensor de distância ultrassônico possibilita que seu robô não só detecte um objeto posicionado à sua frente, como também a distância exata desse objeto até a frente de seu robô. Com funcionamento similar a um sonar, o sensor emite um sinal sonoro não audível e aguarda que o sinal retorne para seu receptor. Calculando o tempo que o som demora para voltar, pode-se descobrir a distância exata em que o anteparo se encontra.
Ao contrário do sensor de linha, esse sensor possui sinal digital, portanto deve ser conectado aos pinos digitais da Julieta. Ele possui 4 pinos que devem ser conectados à placa através dos cabos jumper fêmea-fêmea.
Chegou a hora de conectar os sensores e motores na placa Julieta para que seja possível mover o robô e identificar linhas e objetos! A tabela abaixo mostra onde cada pino deve ser conectado:
Julieta
A placa Julieta foi desenvolvida para ser a opção mais versátil possível para aplicações em robótica. Ela conta com um barramento de entradas/saídas no padrão de 3 pinos para que você possa facilmente conectar sensores, módulos, servo motores, etc. Além disso, um chip de Ponte-H integrado, permite que você controle motores de forma independentes enviando até 2A de corrente para cada um.
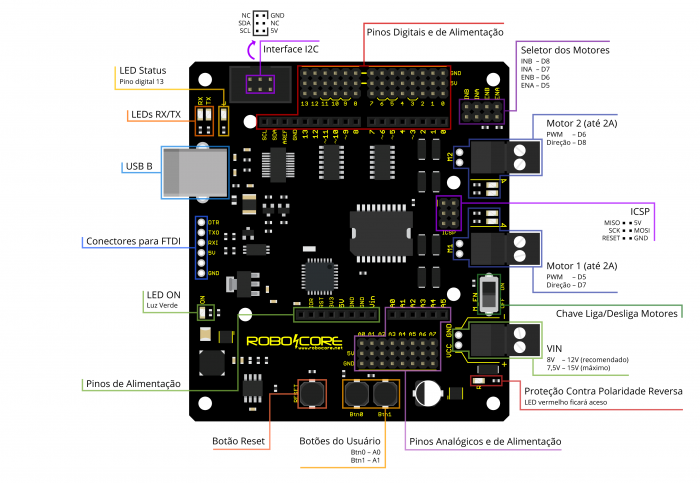
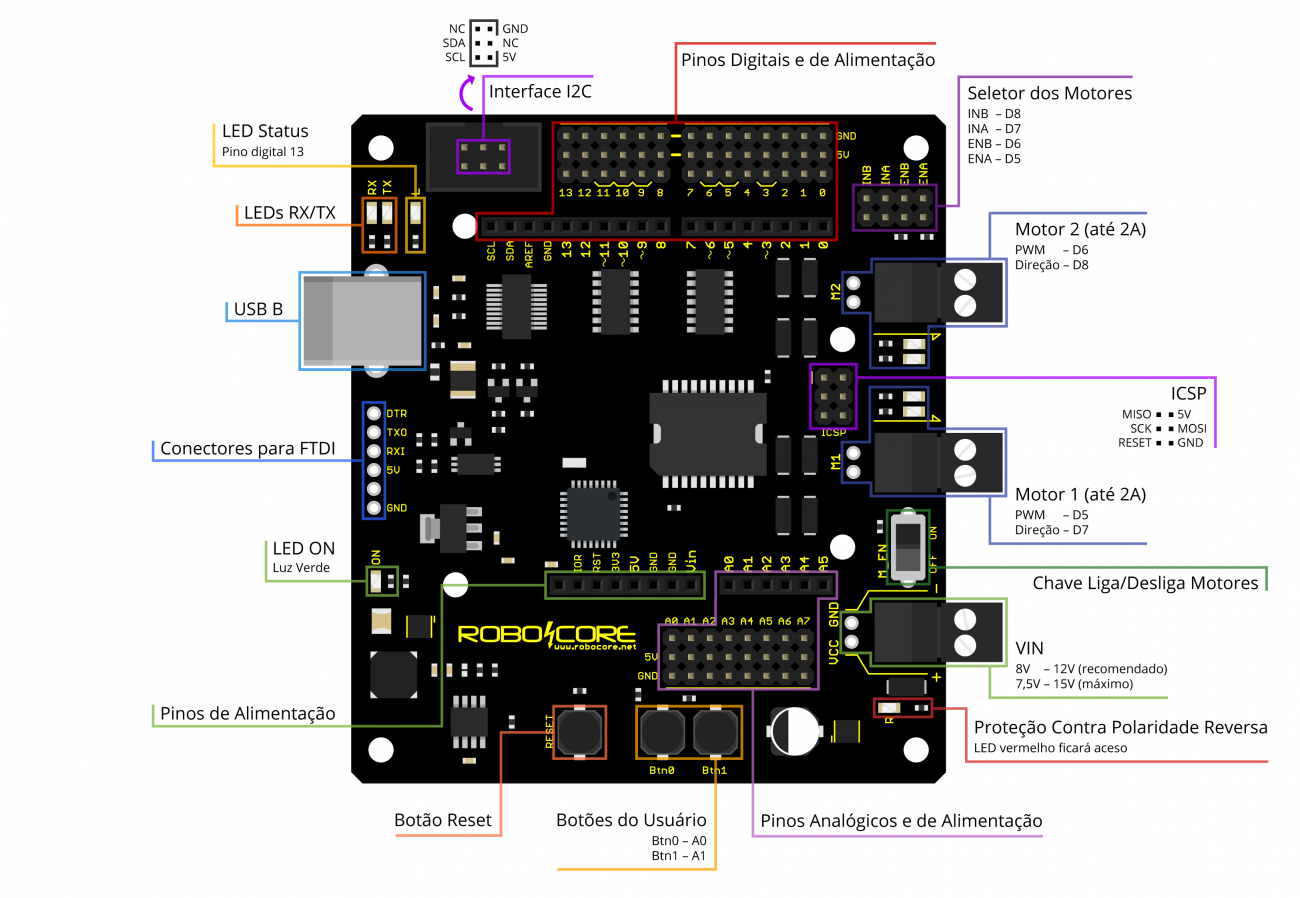
Um breve tour pela placa
Apresentamos abaixo algumas características da Julieta. Caso você não entenda alguma informação, não se preocupe, o que iremos utilizar nos experimentos desse tutorial será melhor explicado adiante. Se você tiver qualquer dúvida sobre a Julieta, conte sempre com o suporte técnico especializado da RoboCore.- USB B: conector USB por onde a placa é programada e se comunica com o computador.
- LEDs RX/TX: indicam comunicação na porta USB. Normalmente piscam rapidamente quando a placa é reprogramada ou quando existe uma comunicação entre a placa e um computador.
- LED Status: conectado ao pino 13 da placa, esse LED pode indicar se o código foi carregado e se está rodando. Também é bastante utilizados para fins gerais.
- Interface I2C: conector no formato IDC, disponibiliza os pinos A4 (SDA) e A5 (SCL) permitindo a fácil conexões com dispositivos I2C.
- Pinos Digitais: barramento que contém os pinos digitais da placa. Cada pino é dispobilizado em um conector de 3 pinos que contém também um pino de GND e 5V.
- Seletor dos Motores: jumpers responsáveis por conectar os pinos do microcontrolador da Julieta aos pinos do chip de Ponte-H integrado (ENA - D5, ENB - D6, INA - D7 e INB - D8).
- Motor 2: saída para o motor 2. Pode acionar uma carga total de até 2A. Controlado pelos pinos D6 e D8 (PWM e Direção, respectivamente).
- ICSP: conector para gravação utilizando programador externo. Também disponibiliza os pinos do barramento SPI da placa.
- Motor 1: saída para o motor 1. Pode acionar uma carga total de até 2A. Controlado pelos pinos D5 e D7 (PWM e Direção, respectivamente).
- Chave Liga/Desliga Motores: chave de habilitação e desabilitação dos motores. Obs: esta chave não desliga a parte lógica da placa, ela apenas impede que a corrente elétrica vá para os motores.
- VIN: entrada de tensão da bateria ou fonte de alimentação dos motores.
- Proteção Contra Polaridade Reversa: um led vermelho é aceso quando a fonte de alimentação é conectada com a polaridade inverida.
- Pinos Analógicos: barramento que contém os pinos de entrada analógica da placa. Cada pino é dispobilizado em um conector de 3 pinos que contém também um pino de GND e 5V.
- Botões de Usuário: dois botões para uso geral nos pinos A0 e A1. Deve-se habilitar os resistores de pull-up internos da placa para sua utilização.
- Botão Reset: retorna o fluxo do código na placa para o início quando pressionado. Este botão não apaga o código da placa.
- Pinos de Alimentação: disponibilizam pinos com GND, 3.3V, 5V e VIN para uso geral.
- LED ON: indica que a placa está energizada. Quando aceso, indica que a bateria/fonte ou o cabo USB está conectado.
- Conector para FTDI: permite utilização de um conversor USB-Serial externo caso o FTDI da placa seja danificado.
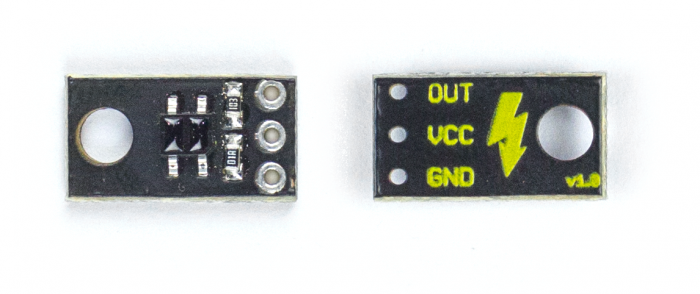
Sensor de Linha
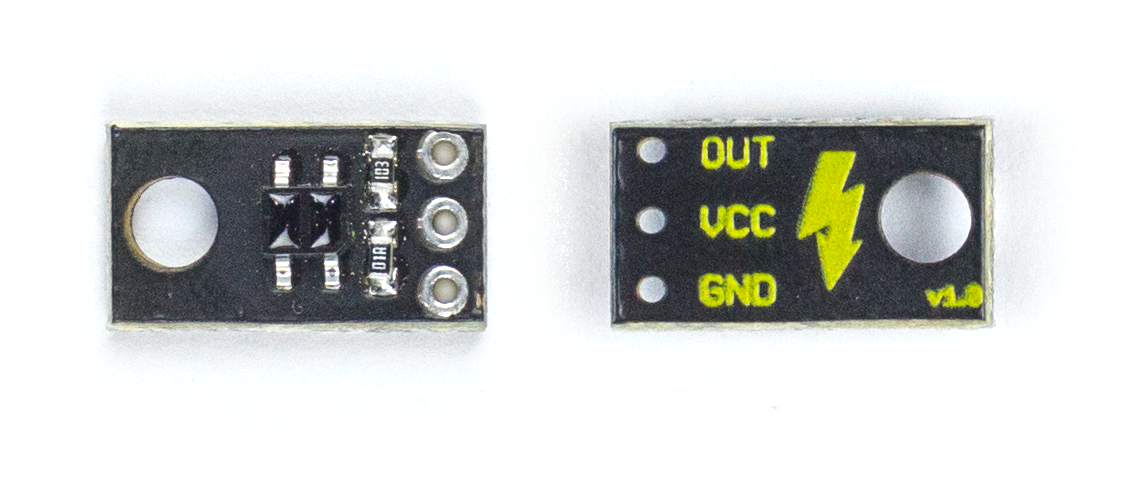
O sensor de refetância QRE é o sensor que trás para o seu robô a capacidade de detectar linhas. O sensor trabalha detectando a luz refletida que sai de seu próprio LED infravermelho. Medindo a quantidade de luz infravermelha refletida, ele pode detectar transições entre uma linha escura e uma superfície clara.
O sensor possui 3 pinos que devem ser conectados à placa Julieta através dos cabos jumper fêmea-fêmea. O sinal de saída do sensor é do tipo analógico, portanto deve ser conectado a um pino analógico. A biblioteca FalconRobot tornará o uso desse sensor simples e prático.
Sensor de Distância

O sensor de distância ultrassônico possibilita que seu robô não só detecte um objeto posicionado à sua frente, como também a distância exata desse objeto até a frente de seu robô. Com funcionamento similar a um sonar, o sensor emite um sinal sonoro não audível e aguarda que o sinal retorne para seu receptor. Calculando o tempo que o som demora para voltar, pode-se descobrir a distância exata em que o anteparo se encontra.
Ao contrário do sensor de linha, esse sensor possui sinal digital, portanto deve ser conectado aos pinos digitais da Julieta. Ele possui 4 pinos que devem ser conectados à placa através dos cabos jumper fêmea-fêmea.
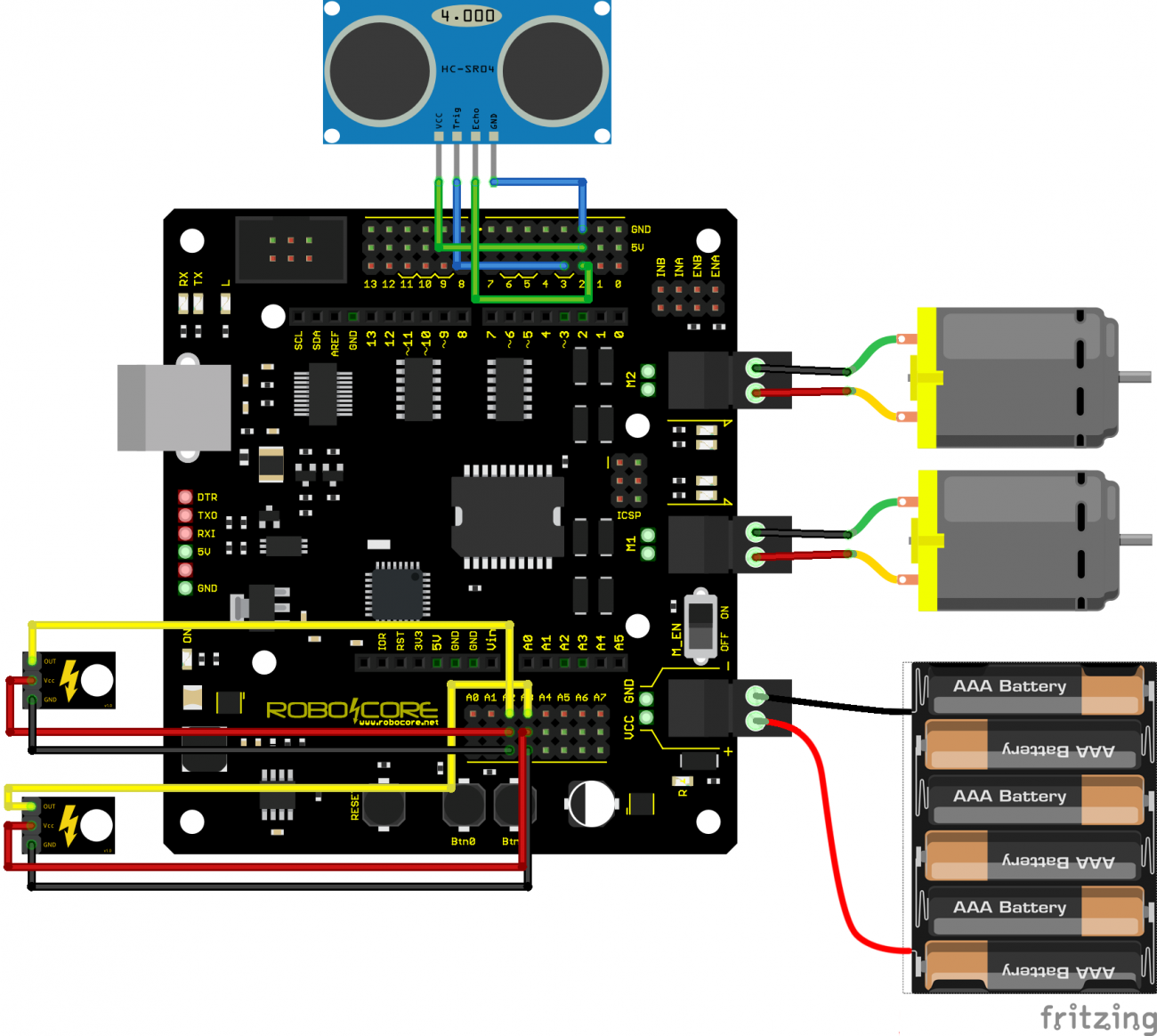
Realizando as conexões
Chegou a hora de conectar os sensores e motores na placa Julieta para que seja possível mover o robô e identificar linhas e objetos! A tabela abaixo mostra onde cada pino deve ser conectado:
| Pino | Julieta | |
|---|---|---|
Sensor de Distância |
GND | GND |
| VCC | 5V | |
| ECHO | D2 | |
| TRIG | D3 | |
Sensores de Linha |
GND | GND |
| VCC | 5V | |
| OUT Esquerdo | A2 | |
| OUT Direito | A3 | |
Motores |
Esquerdo | M1 |
| Direito | M2 |
Atenção: Deixe para ligar os fios das pilhas por último, apenas quando tiver certeza que todo resto está ligado corretamente. Lembre-se de colocar as pilhas no suporte de pilhas da maneira correta.
Veja no esquemático abaixo como você deve conectar os sensores e motores à sua placa Julieta.Atenção: remova a bateria, o cabo USB ou qualquer outra fonte de energia de sua placa antes de realizar qualquer alteração nas ligações. Fazer ou modificar as ligações com a placa energizada pode ocasionar danos permantentes aos componentes.
