You are viewing the Portuguese version of the site, but it has been detected that you are outside of Brazil.
To access the content in English, click here
To access the content in English, click here
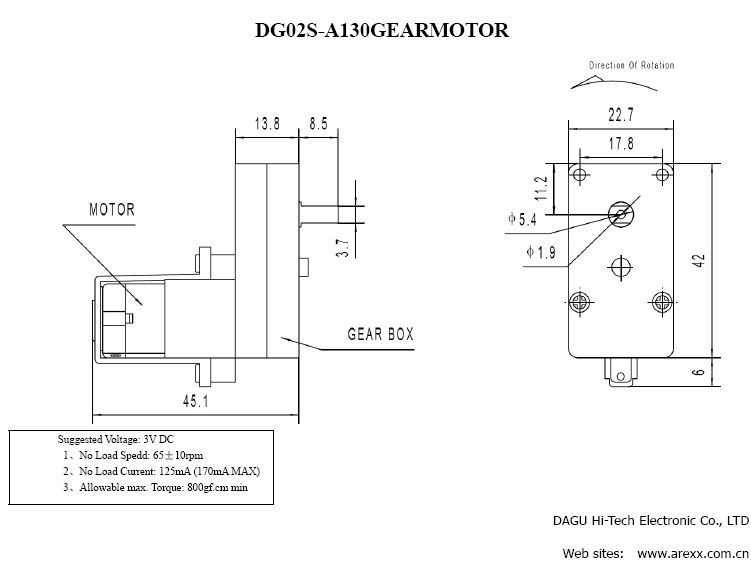
Motor DC 3-6V com Caixa de Redução em Ângulo






Payment methods:
- Pay with PayPal
Produtos Relacionados





O motor ideal para seu primeiro robô. Ele já vai com uma caixa de redução em ângulo para se encaixar no projeto.
Vendido individualmente.
Especificações:
- Tensão de alimentação: 3V a 6V
- Corrente em aberto: 200mA @ 6V (130mA @ 6V)
- Corrente de stall: 2A @ 6V (1A @ 3V)
- Relação da caixa de redução: 48:1
- Velocidade: 65RPM @ 3V sem carga
{kind=link}
Para fazer comentários é necessário estar logado. Efetuar login.
Você ainda nao é cadastrado? Cadastre-se agora!

allanveiga.g
 Enviado 2019-06-15 10:20:52
Enviado 2019-06-15 10:20:52
tem previsão de chegada ????????

Giovanni5
Enviado 2019-06-17 09:42:37
allanveiga.g
allanveiga.g
Acabamos de disponibilizar mais unidades para compra.
AbnerFilho
Enviado 2019-05-06 14:12:50
acompanha os parafusos para fixação na base?
Giovanni5
Enviado 2019-05-06 14:33:06
AbnerFilho
AbnerFilho
Caso você esteja se referindo aos parafusos que fixam o motor à caixa de redução através do suporte branco, sim eles acompanham o motor, inclusive, o motor já é vendido fixo, da maneira que é demonstrado na imagem.
spezzievandro
Enviado 2018-04-22 21:54:59
Boa noite tem como fixar esse motor em outro tipo de base? como se fosse uma superficie plana?

hallszombie
Enviado 2018-04-23 08:58:47
spezzievandro
spezzievandro
O motor possui 4 furos que podem ser usados na fixação do mesmo em superfícies planas.
MarianaLellis
Enviado 2017-12-23 20:43:57
Tem previsão de reposição do estoque? Tem previsão de reposição do estoque?

ViniDj
Enviado 2017-12-27 10:56:42
MarianaLellis
MarianaLellis
Previsão para o final de Janeiro. Temos em estoque neste momento a opção com eixo reto que é similar a esse.
Fag_br
Enviado 2017-09-10 18:20:39
Boa noite, Sendo a corrente em aberto de 200mA em 6V, posso alimentá-lo pelo pino de 5V do Arduíno Uno ? Não pretendo colocar nenhuma carga no motor. Grato.

MarceloFarias
Enviado 2017-09-11 09:30:56
Fag_br
Fag_br
Não. Um pino do Arduino UNO pode fornecer no máximo, 40mA. Ainda assim não recomendamos atingir esse valor. Conectar esse motor diretamente no pino do Arduino irá danificá-lo permanentemente.
Fag_br
Enviado 2017-09-11 10:19:45
Fag_br
Fag_br
Bom dia, Entendo que o limite de 40mA são para as saídas digitais, mas li que no terminal de +5V o limite de corrente é de 350 a 500 mA quando alimentado pela USB. Faz sentido? Obrigado.
MarceloFarias
Enviado 2017-09-11 10:45:29
Fag_br
Fag_br
Se estiver alimentando a placa pela USB, a tensão no pino de 5V é fornecida pela porta USB de seu computador. Dependendo da porta pode ou não funcionar, tendo em vista que o motor tem uma corrente de partida um pouco maior que o nominal e algumas portas ou queimam ou acionam uma proteção contra surtos de corrente. A maneira mais segura de tentar fazer isso seria utilizando uma fonte externa de 7 a 12V e aí sim, como a tensão de 5V será provinda do regulador da placa, acredito que não teria problemas em acionar esse motor. Entretanto, é provável que o regulador esquente bastante devido a potência dissipada, fique atento.
Fag_br
Enviado 2017-09-11 12:29:55
Fag_br
Fag_br
Perfeito. Obrigado.
robose
Enviado 2017-08-19 19:38:42
Posso ligar dois desse motores diretamente com 6 pilhas AA(9VDC)? Obg
MarceloFarias
Enviado 2017-08-21 11:19:00
robose
robose
Sim, você pode. Lembre-se apenas que utilizar valores de tensão superiores ao estipulado pelo fabricante pode diminuir a vida útil do motor. Entretanto, é comum utilizarmos esses motores com 6 pilhas AA sem nenhum problema.
cavarcan
Enviado 2017-04-22 15:59:05
Ola, meu carro está funcionando direitinho, porém um motor está indo mais rápido q o outro, como faço p consertar?
código:
#include <SoftwareSerial.h>
SoftwareSerial bluetooth(2, 3);
int incomingByte;
const int motorA = 5; //velocidade motor A - de 0 a 255
const int motorB = 6; //velocidade motor B - de 0 a 255
const int dirA = 7; //direção do motor A - HIGH ou LOW
const int dirB = 8; //direção do motor B - HIGH ou LOW
void setup() {
bluetooth.begin(9600);
pinMode(motorA, OUTPUT);
pinMode(motorB, OUTPUT);
pinMode(dirA, OUTPUT);
pinMode(dirB, OUTPUT);
}
void loop() {
if(bluetooth.available() > 0) {
incomingByte = bluetooth.read();
if(incomingByte == 'f') {
digitalWrite(dirA, HIGH); //SENTIDO DE ROTACAO
digitalWrite(dirB, HIGH);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
if(incomingByte == 'p') {
analogWrite(motorA, 0); //VELOCIDADE
analogWrite(motorB, 0);
}
if(incomingByte == 't') {
digitalWrite(dirA, LOW); //SENTIDO DE ROTACAO
digitalWrite(dirB, LOW);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
if(incomingByte == 'd') {
digitalWrite(dirA, HIGH); //SENTIDO DE ROTACAO
digitalWrite(dirB, LOW);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
if(incomingByte == 'e') {
digitalWrite(dirA, LOW); //SENTIDO DE ROTACAO
digitalWrite(dirB, HIGH);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
}
}
ViniDj
Enviado 2017-04-24 08:33:49
cavarcan
cavarcan
Como os componentes elétricos e mecânicos nunca são exatamente iguais uns dos outros, pode haver diferenças no comportamento, mesmo quando colocado o mesmo código para os dois canais. A maneira mais fácil de contornar o problema é colocar como velocidade máxima de um lado um valor e outro valor para o outro lado. Assim você corrige a velocidade, fazendo com que o robô ande reto.
cavarcan
Enviado 2017-04-20 14:57:49
como faço p clicar uma tecla do celular, mandar p o bluetooth e aquela função ficar se repetindo até outra tecla ser apertada?
esse eh meu código:
#include <SoftwareSerial.h>
SoftwareSerial bluetooth(2, 3);
int incomingByte;
const int motorA = 5; //velocidade motor A - de 0 a 255
const int motorB = 6; //velocidade motor B - de 0 a 255
const int dirA = 7; //direção do motor A - HIGH ou LOW
const int dirB = 8; //direção do motor B - HIGH ou LOW
void setup() {
bluetooth.begin(9600);
pinMode(motorA, OUTPUT);
pinMode(motorB, OUTPUT);
pinMode(dirA, OUTPUT);
pinMode(dirB, OUTPUT);
}
void loop() {
if(bluetooth.available() > 0) {
incomingByte = bluetooth.read();
if(incomingByte == 'f') {
digitalWrite(dirA, HIGH); //SENTIDO DE ROTACAO
digitalWrite(dirB, LOW);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
wait until
}
if(incomingByte == 'p') {
analogWrite(motorA, 0); //VELOCIDADE
analogWrite(motorB, 0);
}
if(incomingByte == 'r') {
digitalWrite(dirA, LOW); //SENTIDO DE ROTACAO
digitalWrite(dirB, HIGH);
analogWrite(motorA, 200); //VELOCIDADE
analogWrite(motorB, 200);
}
}
}
hallszombie
Enviado 2017-04-20 15:22:10
cavarcan
cavarcan
Olá cavarcan, Você pode usar a função while no lugar da função if. Neste caso esta função executa continuamente determinados comandos "enquanto" a variável não se altere.
cavarcan
Enviado 2017-04-20 15:34:22
cavarcan
cavarcan
Ola, quando fiz isso ele parou de aceitar os próximos comandos e ficava parado naquele
hallszombie
Enviado 2017-04-20 15:38:49
cavarcan
cavarcan
Você deve fazer uma leitura do bluetooth dentro de cada função while para conseguir verificar quando ocorre a mudança do comando.

GRANATO
Enviado 2017-04-13 17:39:25
O eixo é em D de quantos mm?
ViniDj
Enviado 2017-04-13 18:00:25
GRANATO
GRANATO
O eixo não é em formato de D. Ele possui chanfro em dois lados. Você pode ver suas medidas no datasheet, na aba documentação acima.
cavarcan
Enviado 2017-04-09 12:11:19
Essa bateria https://www.robocore.net/loja/produtos/bateria-9v.html carrega dois desses motores?
ViniDj
Enviado 2017-04-10 10:07:10
cavarcan
cavarcan
Você pode usar essa bateria com este motor.
ROBOCORE TECNOLOGIA
A RoboCore foi criada em 2008 com o intuito de incentivar o desenvolvimento tecnologico, fabricando e fornecendo peças para automação e robótica de alta qualidade a preços acessíveis.
RoboCore Tecnologia LTDA
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil
NOSSAS REDES SOCIAIS
LINKS ÚTEIS
POLÍTICAS DA LOJA
CENTRAL DE ATENDIMENTO
Formas de Pagamento
AUDITORIA DE SEGURANÇA

Site 100% Seguro
Auditado Diariamente
Auditado Diariamente