Rodas Omnidirecionais
This tutorial is not available in English

Robô Omnidirecional
O projeto Robô Omnidirecional nasceu da proposta de explorar, de forma visual e conceitual, as possibilidades de movimento proporcionadas pelas rodas omnidirecionais. Utilizando uma base triangular e três rodas omni, o robô é capaz de se deslocar em múltiplas direções sem a necessidade de alterar sua orientação.
O robô foi concebido como uma plataforma de testes. Seu objetivo principal é permitir que o usuário observe, experimente e se divirta com os diferentes tipos de movimento possíveis, servindo também como base para projetos futuros mais complexos.
A estrutura do robô é totalmente fechada, com aproximadamente 10 cm de altura quando montado. Cada vértice da base triangular abriga uma roda omnidirecional, garantindo estabilidade e liberdade de movimento.
Visão geral do robô

Funcionamento geral
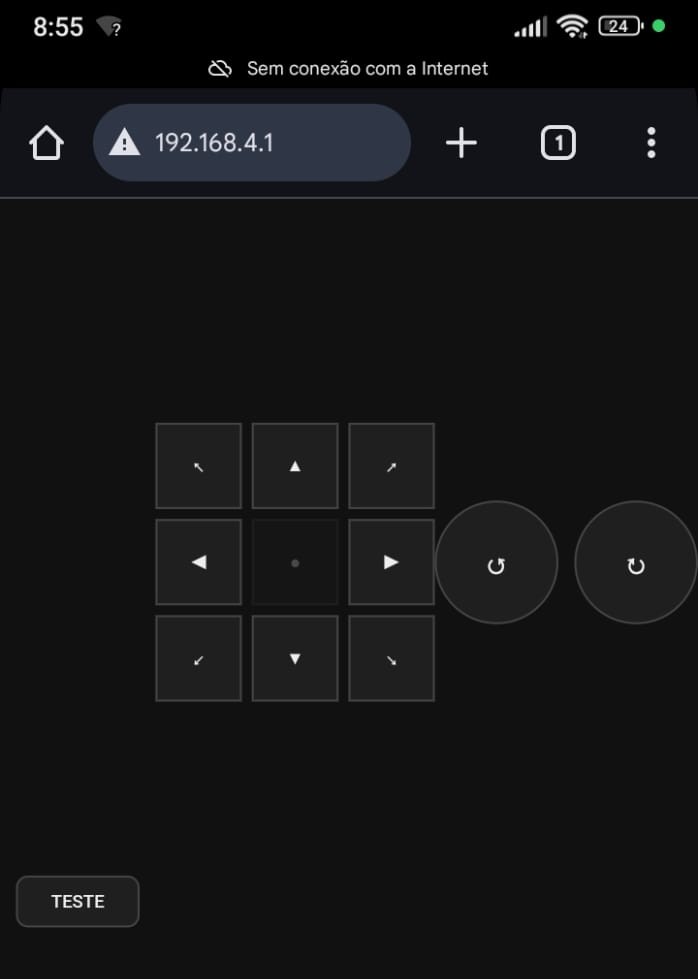
O robô é controlado via interface web, acessível por navegador em celular ou computador. Os movimentos são momentâneos, ocorrendo apenas enquanto o botão correspondente estiver pressionado.
O projeto prioriza a demonstração visual dos movimentos, especialmente os deslocamentos diagonais e os giros no próprio eixo, todos executados em velocidade fixa.
Ao ligar o robô, ele cria automaticamente uma rede Wi-Fi própria. Para evitar que o celular tente alternar para a internet do chip durante o uso, desative os dados móveis e conecte-se diretamente à rede do robô.
- Rede Wi-Fi: ROCKY_CONTROLE
- Senha: 12345678
- Endereço para acesso: http://192.168.4.1
- Tempo médio para a rede aparecer: ~5 segundos após ligar
- Internet: não é necessário (o controle funciona apenas conectado à rede do robô)
Ligações elétricas
A montagem foi pensada para ficar limpa e fácil de replicar. O próprio corpo impresso do robô possui, internamente, marcações nos cantos indicando as posições A, B e C. Assim, basta posicionar cada motor no canto correspondente e conectar na porta correta da BlackBoard Rocky.
- Motor A - Porta A da BlackBoard Rocky
- Motor B - Porta B da BlackBoard Rocky
- Motor C - Porta C da BlackBoard Rocky
A alimentação é feita por um pack de bateria Li-Ion 7,4 V conectado à BlackBoard Rocky. Um dos fios da bateria vai direto para a alimentação da placa, enquanto o outro passa por uma chave liga/desliga (chave gangorra) instalada no próprio corpo do robô. A partir da placa, a BlackBoard Rocky é responsável por alimentar e controlar os motores.
A ligação na placa é feita com cabo. O corpo do robô já foi modelado com o encaixe para a chave gangorra.
Rodas Omnidirecionais
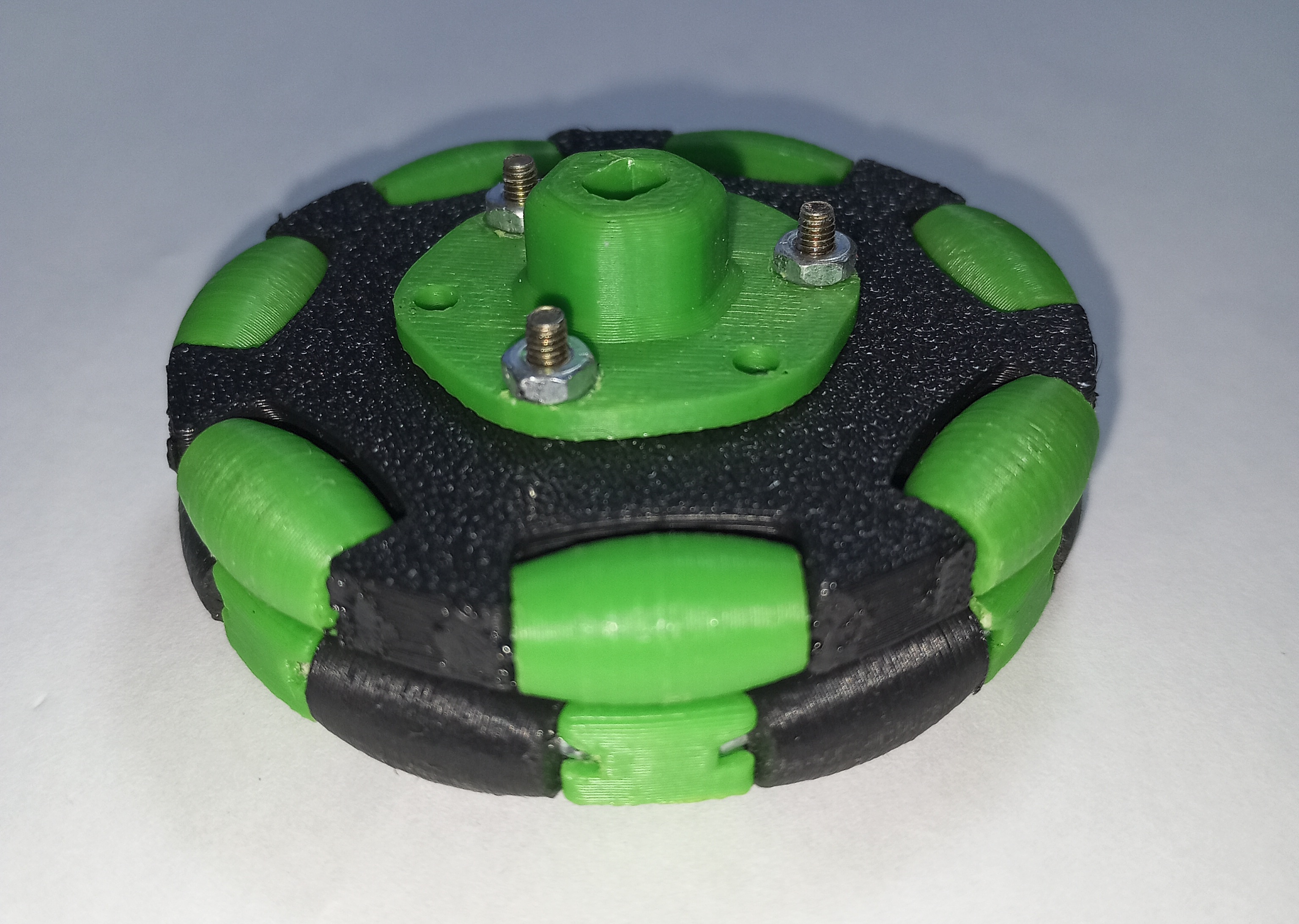
As rodas omnidirecionais são o elemento central deste projeto e são responsáveis pela liberdade de movimento do robô. Elas permitem que o robô deslize lateralmente graças aos pequenos tambores distribuídos ao redor da roda.
Cada roda omnidirecional é constituída por:
- 14 pequenos tambores
- 2 plataformas estruturais, cada uma responsável por fixar 7 tambores
- 1 conector central, responsável por acoplar a roda ao eixo do motor
Cada pequeno tambor possui em seu interior um pequeno prego de aço. Esse prego foi cortado ligeiramente maior que o comprimento do tambor, sendo fixado na base para garantir alinhamento e rigidez.
Após a fixação do prego, foi utilizada uma caneta 3D para fechar o encaixe do tambor, impedindo que o pino se solte durante o uso. Esse cuidado reduz vibrações, melhora a eficiência do movimento e aumenta a durabilidade da roda.
Pinos e parafusos usados na roda
Para montar os tambores da roda, foi utilizado um prego de aço comum (o mesmo tipo usado em acabamento de portas de madeira), facilmente encontrado em loja de material de construção. A cabeça do prego é removida e o corpo é cortado no comprimento correto.
- Pino (eixo) dos tambores: prego de aço com 1,7 mm de diâmetro
- Comprimento do pino: entre 18,8 mm e 20 mm
Na montagem da roda, são utilizados parafusos e porcas M3, sem necessidade de arruelas.
- Rodas: 9 parafusos M3 x 22 mm + 9 porcas M3
- Tampa: 3 parafusos M3 x 15 mm + 3 porcas M3 (estas porcas são coladas na tampa, em encaixes já previstos no modelo)
- Motores: fixação com parafusos M3 x 25 mm
Detalhes da roda omnidirecional


Lista de materiais
- 1x BlackBoard Rocky
-
3x
Motor DC 3-6 V com caixa de redução
Os encaixes do projeto são compatíveis tanto com o motor amarelo quanto com o motor azul com engrenagens metálicas. Ambos funcionam corretamente no robô.
- 1x Pack de bateria Li-Ion 7,4 V 2500 mAh com BMS
- 1x Chave gangorra (liga/desliga) KCD1-101-2T
-
1x
Mini carregador para bateria de lítio 2S
Este carregador é indicado para baterias 2S (7,4 V). Para carregar, remova o pack do robô e conecte diretamente no carregador.
-
1x
Fonte chaveada 9 V 1 A
Utilizada para alimentar o carregador 2S durante o carregamento do pack de bateria.
-
3x Rodas omnidirecionais (impressas em 3D)
É possível imprimir o robô e as rodas usando apenas um rolo de filamento. Caso queira economizar, imprima tudo na mesma cor.
-
Filamento PLA Creality Prateado
Todo o projeto foi impresso em PLA.
-
Cabo JST-RCY 2 pinos
Cabo adaptador que eh fixo na Rock.
Arquivos para impressão 3D
Use o botão abaixo para fazer o download do arquivo STL/3mf do Robô e da roda omnidirecional.
Configurações de impressão 3D
Para equilibrar resistência, peso e economia de material, algumas partes do projeto foram impressas com configurações diferentes. Os pequenos tambores foram feitos com preenchimento total para aumentar rigidez e reduzir vibração, enquanto as demais peças usam preenchimento moderado.
- Material: PLA
- Tambores (rolinhos): 100% de preenchimento
- Demais peças: 15% de preenchimento
- Camadas de tampa/perímetro: 3 camadas
Um rolo de filamento foi suficiente para imprimir o robô e as rodas.
Código
O código do projeto foi desenvolvido com foco em clareza e reutilização, servindo como base para testes de movimento omnidirecional. A estrutura permite fácil adaptação para novos robôs e futuras expansões.
O controle é feito via navegador: conecte-se à rede Wi-Fi do robô (ROCKY_CONTROLE) e acesse o endereço 192.168.4.1. Os botões são momentâneos, ou seja, o movimento ocorre apenas enquanto o botão estiver pressionado.
Boas práticas
- Dica, interface web super minimalista, intuitiva, aceita um comando por vez
- Fixar corretamente os motores e rodas
- Garantir alinhamento adequado das rodas omnidirecionais
- Organizar bem os cabos internos
- Testar os movimentos com o robô suspenso antes do uso no solo
- Utilizar bateria adequada para os motores DC
- Para carregar o pack, remova a bateria do robô e conecte no mini carregador 2S