CyberTrack Starter Kit
This tutorial is not available in English

Introdução
Acabou de receber seu kit CyberTrack e quer começar a usá-lo? Neste tutorial, mostramos passo a passo como montar o robô e utilizar todas as funções do aplicativo RoboCore Joystick, de forma simples e prática.
Preparação
Antes de iniciar a montagem do seu robô, recomendamos que os cabos dos motores sejam soldados, senão isso será difícil de fazer com os motores presos no chassi. Veja abaixo um vídeo curto de como fazer essa solda:
Atenção: o kit não acompanha ferramentas de soldagem, como ferro de solda, estanho ou suporte. Se você ainda não possui esses itens, será necessário adquiri-los separadamente. Veja o Kit de Solda que temos disponível para facilitar essa etapa.
Aproveitando o uso do ferro de solda, una os pads "MIXER" da placa controladora 2x40A com solda, conforme mostrado nas figuras a seguir:

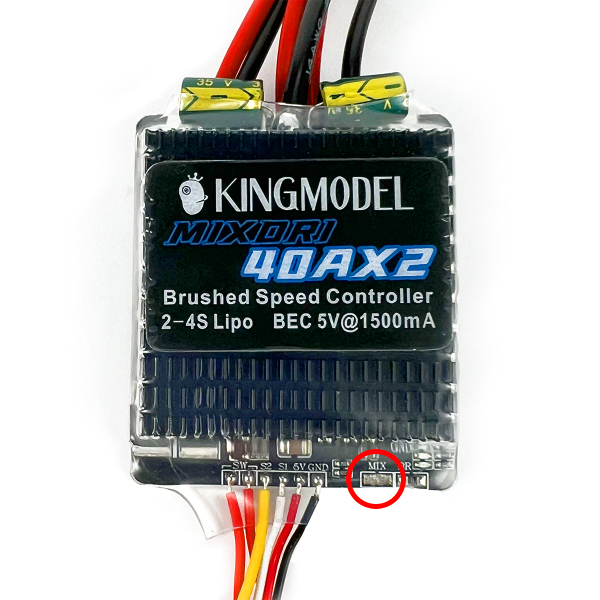
Ao unir (soldar) os pads MIXER, o mixing da controladora é desativado, ou seja, os sinais deixam de ser combinados internamente e o controle passa a ser feito externamente (via código). Isso permite utilizar um sinal para cada motor de forma independente, facilitando o controle em sistemas de locomoção como este, com duas esteiras.
Montagem Mecânica
Comece montando as esteiras conforme o manual abaixo. Lembre-se de deixar um dos elos de cada esteira aberto para facilitar a fixação no chassi mais adiante.
Manual de montagem EsteiraAtente-se às notas nos manuais de montagem, pois eles fornecem algumas dicas que facilitam o processo.
Em seguida, monte o chassi usando o manual logo abaixo, até a etapa 08. É importante que os fios dos motores já estejam soldados antes de fixá-los ao chassi. Interromper a montagem na etapa 08 facilitará a instalação dos componentes eletrônicos.
Manual de montagem Chassi CyberTrackCom a montagem mecânica do chassi interrompida na etapa 08, será necessário alterar um dos parafusos já fixados no robô. Essa alteração permitirá a instalação da base (ou "cama") nas etapas seguintes. Substitua o parafuso indicado na imagem abaixo por um parafuso M4x16.

Após a substituição do parafuso, fixe a base no chassi. Depois de fixada, coloque a arruela e trave o conjunto com a porca M4 autotravante. A chave de boca de acrílico (inclusa com a esteira) pode ajudar no aperto da porca.
A base tem como função evitar que os componentes encostem diretamente no chassi, prevenindo possíveis curtos-circuitos, e organizar o circuito interno.
Montagem Eletrônica
Com a parte mecânica quase finalizada, é hora de realizar as conexões eletrônicas. A imagem abaixo serve como referência para a ligação dos componentes. Recomendamos fixar cada componente na base antes de realizar as conexões, assim facilitará o manuseio e garantirá a organização.
Atenção: baterias de lítio polímero (LiPo) podem pegar fogo quando perfuradas ou quando sob estresse extremo (como um curto-circuito), portanto é importante tomar cuidado ao usá-las e armazená-las.

Após fixar os componentes na base e realizar todas as conexões, os componentes e os fios devem ficar organizados conforme mostrado na imagem abaixo.

Depois disso, retome o manual de montagem a partir da etapa 09 para finalizar o robô. Após finalizar a montagem eletrônica e mecânica, chegou a hora de controlar o robô, vamos controlá-lo por meio do aplicativo RoboCore Joystick.
Antes de ligar o seu robô, é recomendável carregá-lo.
Instalação do Aplicativo
Como mencionado anteriormente, utilizaremos o aplicativo RoboCore Joystick para controlar o robô. Ele é compatível com dispositivos iPad, iPhone e Android™. Instale o aplicativo por meio dos links abaixo, conforme o sistema operacional do seu dispositivo:


Conexão com o Robô
O CyberTrack possui uma chave liga/desliga posicionada próximo à esteira. Para ligá-lo, coloque a chave na posição "ligada".
Com o robô e o Bluetooth do seu smartphone ligados, abra o aplicativo baixado anteriormente em seu smartphone e toque no ícone de Bluetooth localizado na parte superior direita da tela, conforme demarcado na imagem abaixo:

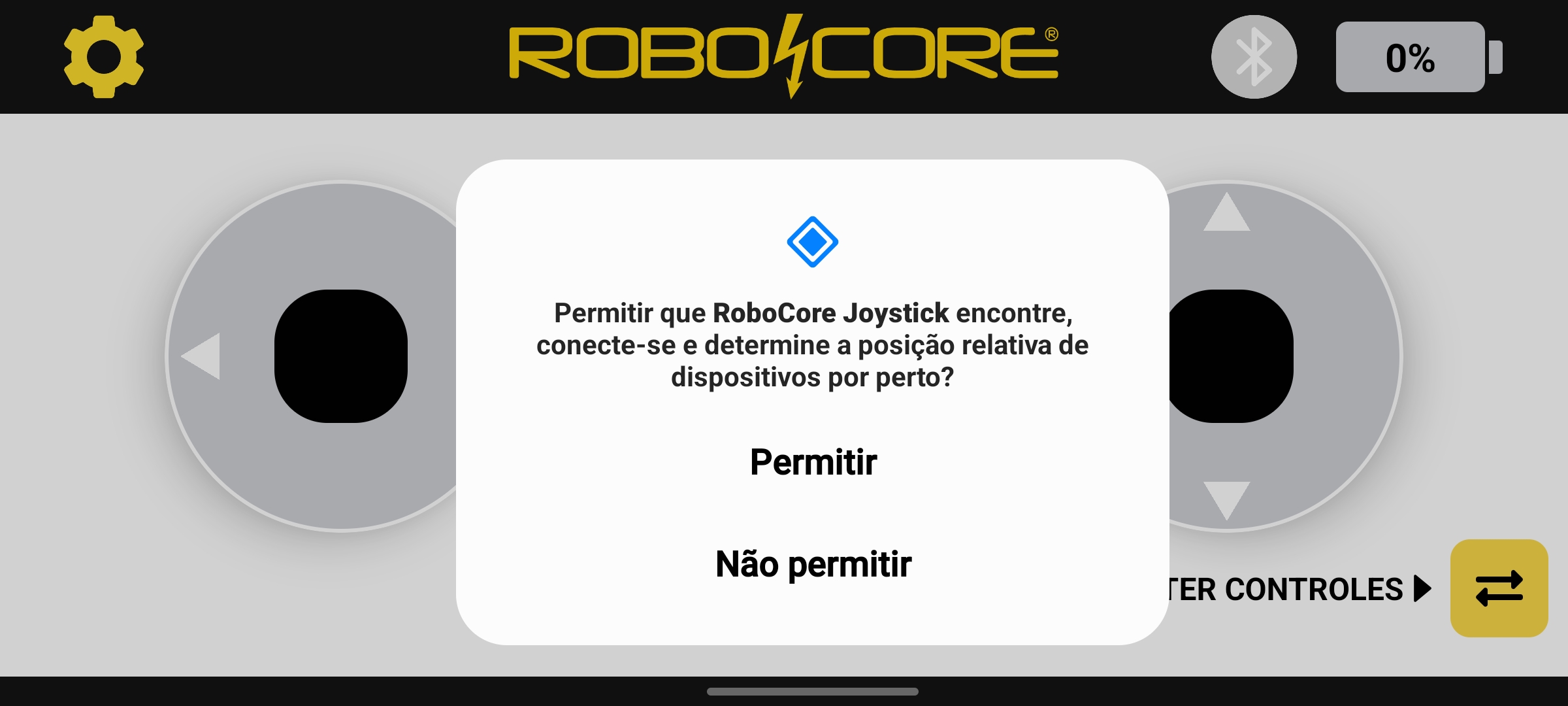
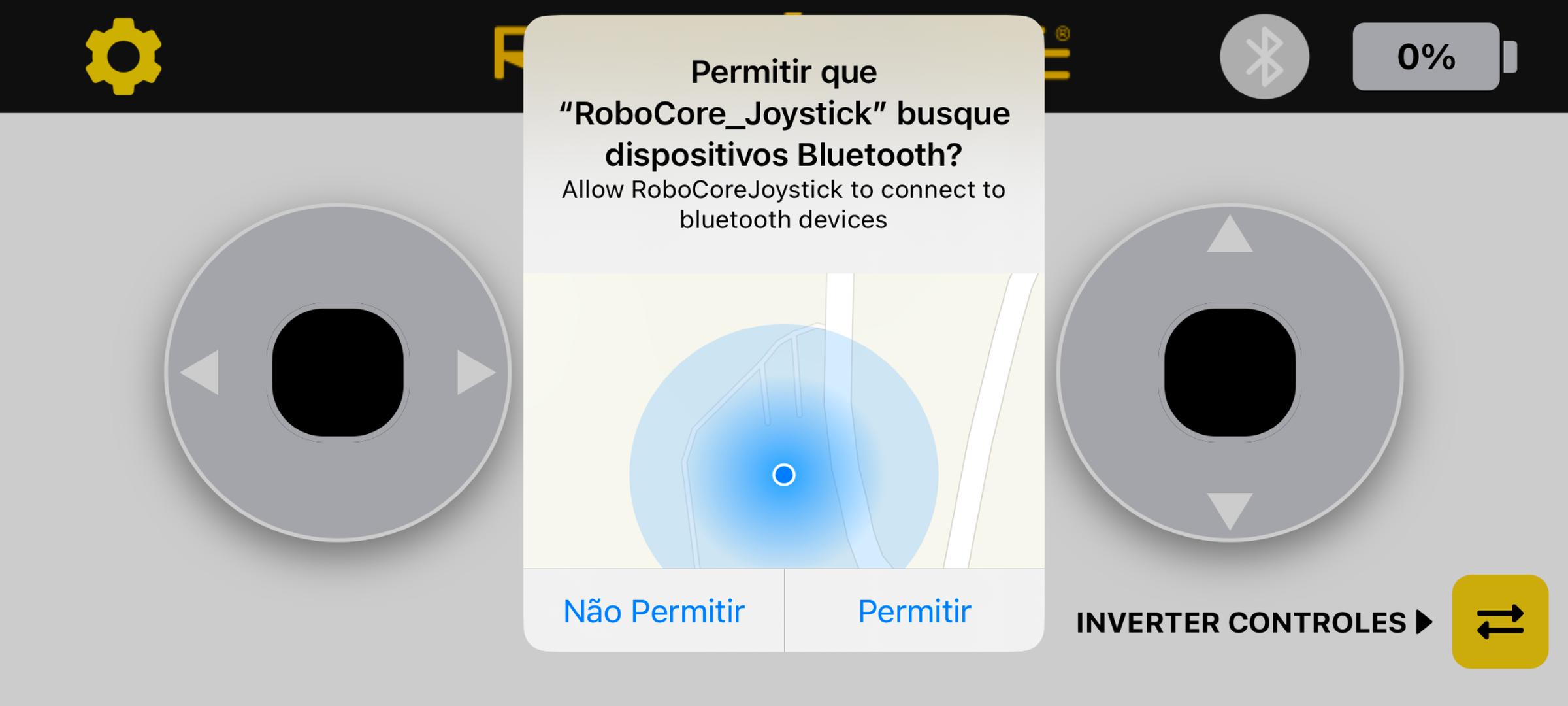
O aplicativo deve pedir permissão para encontrar e conectar a dispositivos por perto ou pedir permissão para buscar dispositivos Bluetooth. É importante permitir que o aplicativo tenha acesso a essas funcionalidades, caso contrário, não será possível se conectar ao robô.
Após conceder as permissões, uma janela será exibida com os robôs que estão disponíveis para conexão.

O nome padrão do robô será algo como "CyberTrack-xx:xx", onde os últimos quatro caracteres representam um número único e exclusivo para cada robô. Isso significa que os números finais podem variar entre os robôs.
Para se conectar ao robô, basta clicar sobre o nome dele na lista. Se a conexão for bem-sucedida, uma mensagem de confirmação aparecerá no aplicativo e o LED laranja passará a ficar aceso continuamente, indicando que a conexão foi estabelecida com sucesso.
Controle do Robô
Com o smartphone conectado ao robô, você pode controlá-lo utilizando os joysticks de avanço (frente e ré) e de direção (esquerda e direita). Se quiser conhecer mais detalhes sobre o robô e o aplicativo, continue lendo o tutorial.
Observação: se, ao comandar o robô para a frente, um dos motores girar no sentido contrário, basta inverter os cabos de conexão desse motor. Não é necessário refazer a solda. Além disso, recomendamos desconectar completamente a bateria do circuito após o uso, para conservar a vida útil dela, e armazená-la em um local seguro.
Funções do Aplicativo
Veja na imagem abaixo as indicações das funções da tela inicial do aplicativo:

Bluetooth
Como vimos anteriormente, a função Bluetooth permite conectar o dispositivo a um robô. Além disso, essa função também pode ser usada para se desconectar do robô. Quando já conectado a algum dispositivo, o robô não será listado para outros dispositivos até que a conexão seja encerrada.
Bateria
O indicador de bateria é essencial para monitorar a porcentagem atual da bateria e saber quando está na hora de carregar o robô, evitando interrupções durante o uso. Quando a bateria atingir 0%, você verá uma mensagem informando que ela está muito baixa e que é necessário recarregar o robô para continuar utilizando-o. Além disso, o LED laranja do robô deve piscar mais rápido para indicar que a carga da bateria está muito baixa.

Nos próximos tópicos do tutorial, veremos como carregar o robô.
Inverter Controles
Como o próprio nome sugere, essa função inverte os comandos dos joysticks, ou seja, os controles de avanço e direção são invertidos, como demonstrado no GIF abaixo:
Configurações
Ao clicar sobre o ícone de configurações, uma nova janela aparecerá com algumas opções: Bluetooth, Renomear robô e Informações do robô conectado.

A opção Bluetooth possui as mesmas funcionalidades citadas anteriormente.
Já a opção de renomear o robô permite que você atribua um nome personalizado a ele. Essa funcionalidade é especialmente útil em ambientes com múltiplos robôs, facilitando a identificação individual de cada. Ao clicar nessa opção, será solicitado que você insira o novo nome desejado para o robô.

O nome do robô deve conter até 10 caracteres, podendo ser letras, números, hífen (-) e underscore (_). Após digitar o nome desejado, clique no botão "OK" e aguarde a mensagem de confirmação da alteração, como mostrado no GIF a seguir:
Após renomear o robô, ao acessar a opção de Bluetooth, você deverá visualizar o nome atualizado com o novo nome escolhido.
Voltando para o menu de configurações, ainda há a opção "Informações do robô conectado". Essa opção lista as informações detalhadas sobre o robô conectado, como a versão do firmware, o número de série e a versão do chassi. Essas informações são úteis para fins de identificação e suporte técnico.

Carregar o Robô
Para carregar a bateria LiPo 3S (11,1 V) do CyberTrack, é necessário utilizar um carregador apropriado, como este. Antes de iniciar o carregamento, certifique-se de que a bateria esteja completamente desconectada do robô.
Também é recomendado manter a bateria dentro de um LiPo Sack enquanto ela não estiver em uso no robô, ou seja, enquanto está sendo carregada ou quando armazenada, por exemplo.
Solução de Problemas
Caso tenha alguma dificuldade ao seguir o tutorial ou controlar o robô, tente as soluções abaixo ou entre em contato conosco através do e-mail suporte@robocore.net para que possamos te ajudar da melhor forma possível.
O menu de Bluetooth não abre
Verifique se o Bluetooth do seu dispositivo está ligado antes de tentar uma nova conexão com o robô.
Ative a localização do seu dispositivo
Caso você receba esta mensagem ao tentar se conectar ao robô, será necessário ativar a localização do dispositivo, além do Bluetooth.
A comunicação com o robô foi perdida
Caso você receba esta mensagem, verifique se o robô está ligado e se não há nenhum dispositivo conectado a ele.
Motores girando ao contrário
Caso, ao comandar o robô para a frente, um dos motores girar no sentido contrário, basta inverter os cabos de conexão desse motor. Não é necessário refazer a solda, basta inverter a conexão diretamente na controladora.
