Primeiros Passos com Sensor Ultrassônico
Introdução
Este tutorial tem como objetivo explicar o funcionamento do sensor HC-SR04 e mostrar sua aplicação básica.
Lista de Materiais
Lista completa de produtos
comprar
BlackBoard UNO R3

Sensor Ultrassônico - HC-SR04

LCD 16x2 Com Interface I2C

Cabo USB AB 1.50m

Jumpers Macho-Fêmea x40 Unidades
Funcionamento
O HC-SR04 tem seu funcionamento baseado no envio (trigger) e recebimento (echo) de ondas ultrassônicas, ou seja, o sensor não envia nenhuma medida para o controlador, apenas sinaliza quando o pulso enviado é recebido. Neste caso o Arduino é responsável por medir o tempo e calcular as distâncias, tomando como referência o tempo que a onda ultrassônica demora para atingir um objeto e voltar.
No gif abaixo é possível observar o efeito citado anteriormente. Quando medimos o pino echo do sensor com auxílio do osciloscópio verificamos a variação da largura do pulso (tempo) quando a distância sofre variação.
Depois de medir o tempo da onda ultrassônica, o Arduino também se encarrega em calcular a distância que o sensor está do objeto, utilizando a equação abaixo, presente na biblioteca Ultrasonic.

Aplicação
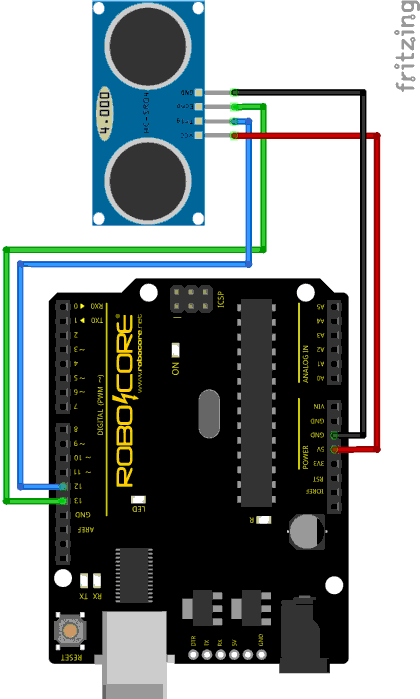
- Monte o sensor na Blackboard/Arduino seguindo o esquemático apresentado a seguir. Ligando os pinos de alimentação do sensor (5V e GND), o pino ECHO ao pino 13 e TRIG ao pino 12.
- Faça o download da biblioteca do sensor pelo botão abaixo. Download da biblioteca
- Instale a biblioteca do sensor. Caso não saiba como instalar uma biblioteca vide o tutorial "Adicionando Bibliotecas na IDE Arduino".
- Faça o upload do código abaixo.
- Com este código é possível configurar quais pinos seram usados pelo sensor e envia ao LCD, a distância que o sensor esta do objeto.