You are viewing the Portuguese version of the site, but it has been detected that you are outside of Brazil.
To access the content in English, click here
To access the content in English, click here
Sensor de Refletância QRE - Analógico








Payment methods:
- Pay with PayPal
Produtos Relacionados



Esta versão da QRE1113 permite com uma saída analógica, fazer a detecção de uma linha de uma maneira fácil, por meio da variação de luz infravermelha refletida pela superfície onde está a linha. Esta pequena placa é perfeita para robôs seguidores de linha e pode ser usada em sistemas de 3,3V e 5V.
O sensor QRE1113 possui duas partes: um LED emissor de luz infravermelha e um fototransistor sensível à luz infravermelha. Quando você alimenta a placa pelos pinos VCC e GND, o LED infravermelho irá acionar. Um resistor de 100 Ohm na placa e colocado em série com o LED, limita a corrente do mesmo. Um resistor de 10k Ohm coloca a saída em nível alto, mas quando a luz do LED é refletida de volta para o fototransistor, a tensão da saída irá variar, diminuindo. Quanto maior a luz infravermelha sentida pelo fototransistor, menor será a tensão de saída no pino da placa.
Este sensor é muito utilizado em robôs seguidores de linha. Superfícies brancas refletem muito mais luz infravermelha do que pretas, portanto, ao fazer uma pista para seu robô seguidor de linha, prefira uma superfície preta com uma linha branca.
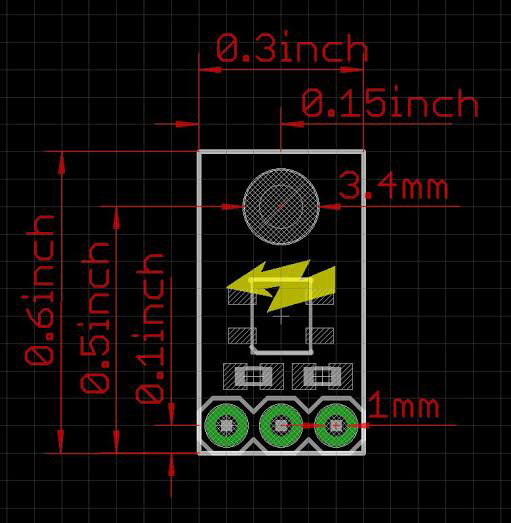
Os três pinos da placa estão em um barramento padrão de 0,1". A placa também tem um furo para fixação que pode ser usado com um parafuso.
Documentação e Especificações
{kind=link}
Para fazer comentários é necessário estar logado. Efetuar login.
Você ainda nao é cadastrado? Cadastre-se agora!

Henriqueitao
 Enviado 2024-09-12 20:41:52
Enviado 2024-09-12 20:41:52
Olá, tem previsão de quando voltara a ter estoque?

carlos.oliveira
Enviado 2024-09-13 08:10:08
Henriqueitao
Henriqueitao
Olá! Devemos repor esse sensor ao estoque na primeira quinzena de Outubro. Para receber uma notificação quando o sensor estiver disponível, clique no botão "Avisar quando chegar".

guilhermekl99
Enviado 2022-09-12 12:44:58
Olá, tem alguma informação em relação a corrente de funcionamento deste sensor?

Giovanni5
Enviado 2022-09-12 14:13:52
guilhermekl99
guilhermekl99
Este sensor tem um consumo de corrente aproximado de 50 mA.
guilhermekl99
Enviado 2022-05-23 13:46:11
Olá, alguma previsão de novas unidades?

luan.ferreira
Enviado 2022-05-23 15:51:43
guilhermekl99
guilhermekl99
Olá! Muito provavelmente ele estará disponível para compra por volta do final do mês de junho. Sugerimos que selecione a opção "Notifique-me quando chegar" na página do produto, para receber uma mensagem em seu e-mail, assim que este sensor estiver disponível para compra.

czjoaoaugustocz
Enviado 2022-03-15 12:12:40
Podem liberar alguma biblioteca para o eagle e o modelo 3D do mesmo?
Giovanni5
Enviado 2022-03-15 15:35:59
czjoaoaugustocz
czjoaoaugustocz
Infelizmente não temos este sensor como um bloco para o Eagle, e nem um modelo 3-D dele. Todos os arquivos que temos para compartilhar já estão disponíveis na "Descrição".
lotorio
Enviado 2021-11-10 11:25:55
Obrigado Sr. Giovanni5.. Na verdade não é uma superfície com duas cores, é só uma borda de um plástico branco que fica passando sem encostar em nada, ou seja, é a borda do plástico e o ar.

Francois
Enviado 2021-11-11 12:16:07
lotorio
lotorio
Em princípio, você pode usar o sensor QRE para isso. Porém, é necessário haver uma diferença de brilho entre as duas condições (quanto maior, melhor) para você conseguir determinar onde está a borda. O plástico branco deve refletir bastante luz e, na ausência dele, o sensor deve receber pouca luz, logo provavelmente você conseguirá verificar a borda.
lotorio
Enviado 2021-11-10 09:08:07
Ele pode ser usado para ler uma borda?
Giovanni5
Enviado 2021-11-10 09:34:40
lotorio
lotorio
Sim, este sensor é capaz de identificar bordas, porém ele terá um resultado melhor se a borda tiver uma cor diferente do restante da superfície.
lauro.junior1999
Enviado 2019-09-20 18:56:34
Comprei 3 unidades deste sensor. Realizando a calibração, 2 funcionaram perfeitamente alterando entre 40 a 980, porém na hora de testar o 3, ele realiza alteração de 1018 a 1023, oque pode estar ocorrendo ?
Giovanni5
Enviado 2019-09-23 09:35:34
lauro.junior1999
lauro.junior1999
Você utilizou o mesmo teste e condições para as três unidades? Vale lembrar que o módulo QRE pode ter suas leituras variadas de acordo com a luminosidade ambiente, assim como a proximidade e material do objeto lido. Entretanto, deve haver uma diferença grande entre as leituras da cor preta e a cor branca. Tente eliminar a interferência externa e padronizar o teste com as cores preta branca, e observe o resultado.
andre020179a020179
Enviado 2018-08-07 22:22:31
CARA EU COMPREI 6 SENSORES DESSE PARA O MEU PROJETO, POREM A LEITURA COM O CODIGO QUE HÁ NO TULTORIAL NÃO FUNCIONA

ViniDj
Enviado 2018-08-08 15:00:04
andre020179a020179
andre020179a020179
Qual tutorial você está usando?
andre020179a020179
Enviado 2018-07-06 22:15:25
Com esse sensor consigo diferenciar uma linha verde de uma preta?e de uma branca?
ViniDj
Enviado 2018-07-11 07:56:07
andre020179a020179
andre020179a020179
Esse sensor funciona da seguinte forma: existe um LED emissor infravermelho ao lado de um fototransistor. O LED emissor fica constantemente enviando um sinal infravermelho pra frente e, conforme a barreira, mais ou menos luz infravermelha retorna ao fototransistor. Se for uma superfície preta, por exemplo, ela absorve mais luz portanto volta menos luz para o fototransistor. Se for uma superfície branca, ela absorve menos luz, portanto volta mais luz para o fototransistor. Dessa forma é possível de uma forma muito fácil diferenciar o preto do branco. Já o verde provavelmente haverá uma diferença, mas não é possível dizer se vai ser grande o suficiente para diferenciar das outras cores.
vitorboechatbotelho
Enviado 2018-04-10 21:53:26
Como eu faço para calibrar o sensor? Um reconhece a cor numa faixa e o outro noutra.

hallszombie
Enviado 2018-04-11 07:30:54
vitorboechatbotelho
vitorboechatbotelho
A calibração é feita pela programação, simplificadamente você deverá definir um valor base de leitura, quando o sensor está sobre e fora da faixa. Lembrando que as leituras do sensor devem ser feitas com uma distancia de até 1mm da faixa, caso a distancia seja superior, a leitura do sensor será prejudicada.
ROBOCORE TECNOLOGIA
A RoboCore foi criada em 2008 com o intuito de incentivar o desenvolvimento tecnologico, fabricando e fornecendo peças para automação e robótica de alta qualidade a preços acessíveis.
RoboCore Tecnologia LTDA
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil
CNPJ 10.383.409/0001-98
D-U-N-S Certified: 89-963-8833
Santana de Parnaiba/SP - Brasil
NOSSAS REDES SOCIAIS
LINKS ÚTEIS
POLÍTICAS DA LOJA
CENTRAL DE ATENDIMENTO
Formas de Pagamento
AUDITORIA DE SEGURANÇA

Site 100% Seguro
Auditado Diariamente
Auditado Diariamente